
The Calculator Encyclopedia Calculates the Position of Turning Point for a Vehicle (Vehicle Dynamics)
Last Updated on February 10, 2024
In vehicle dynamics, determining the position of turning points is crucial for designing efficient and safe vehicles. Hence, professionals must rely on accurate calculations to optimize vehicle performance and maneuverability. A specialized calculator can expedite this proces of calculating the position of turning point for a vehicle, providing precise turning point positions and enhancing overall vehicle dynamics engineering.
Calculating the position of turning point for a vehicle must put into consideration the x co-ordinate and y co-ordinate positions of turning point.
There are various parameters you need to be able to calculate these positions. I would start to with how Nickzom Calculator calculates the position of turning point (x co-ordinate).
You are required to have 4 parameters to get the answer for the position and these parameters are:
- Steer Angle of the Rear Outer Wheel
- Rear Track
- Distance of Rear Wheel from Mass Center
- Steer Angle of Rear Inner Wheel
How to Calculate the Position of Turning Point for a Vehicle
To access this functionalities in Nickzom Calculator, you need to purchase our professional version – Nickzom Calculator+ (The Calculator Encyclopedia). You can access this software via any of these channels:
Web – https://www.nickzom.org/calculator-plus
Android (Paid) – https://play.google.com/store/apps/details?id=org.nickzom.nickzomcalculator
Apple (Paid) – https://itunes.apple.com/us/app/nickzom-calculator/id1331162702?mt=8
With that done, now it’s time to calculate the position of turning point for a vehicle using the Nickzom calculator. Open up the app, select Engineering and click on Open Section.
Click on Mechanical
Then, click on Vehicle Dynamics
Click on Vehicle Kinematics
Next, click on position of turning center for a vehicle
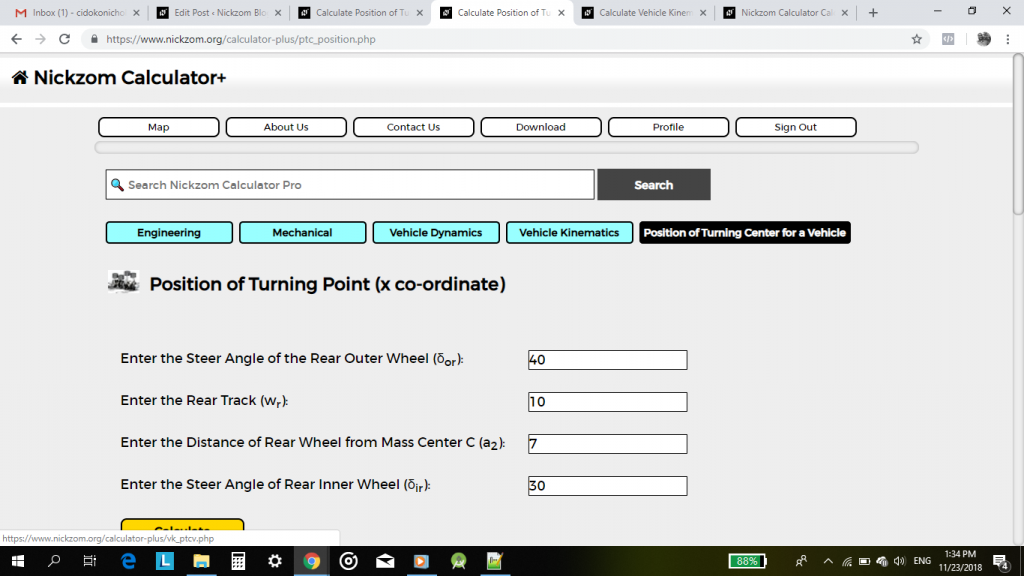
Since we are handling for the x co-ordinate first. Click on Position of Turning Point (x co-ordinate)
This would display a page or activity for you to enter the correct values for the various parameters.
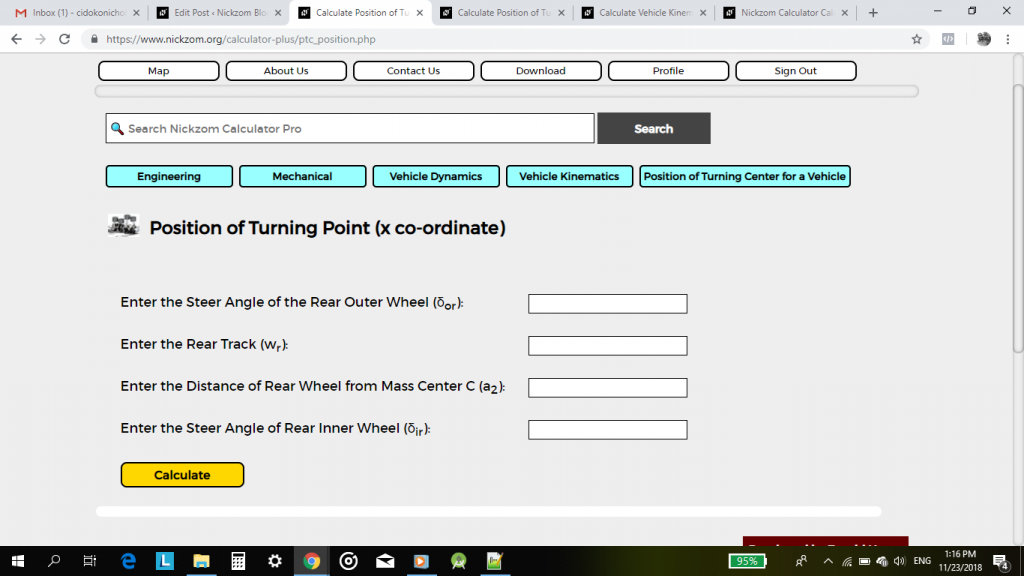
Now, enter the values of the parameters accordingly.
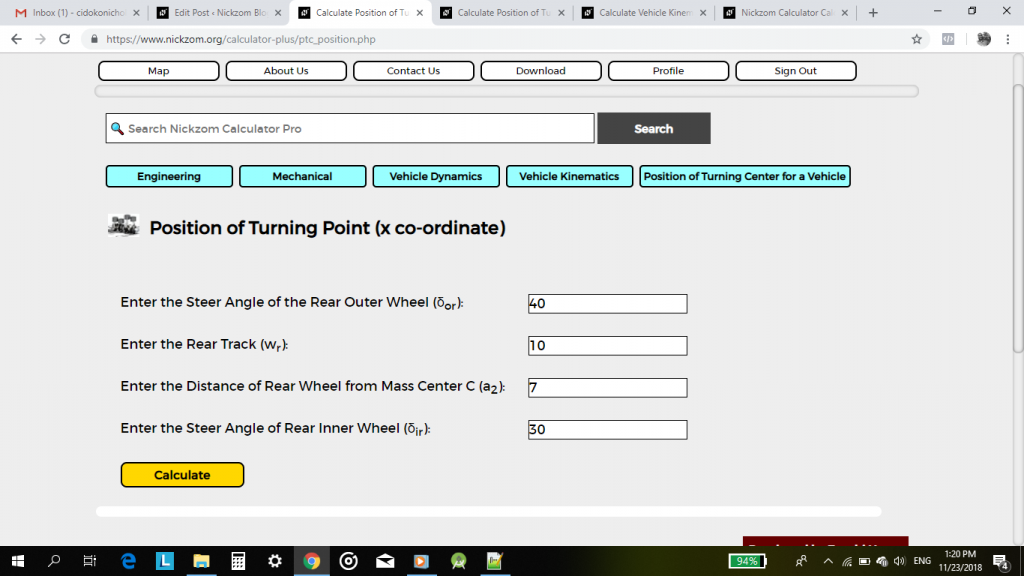
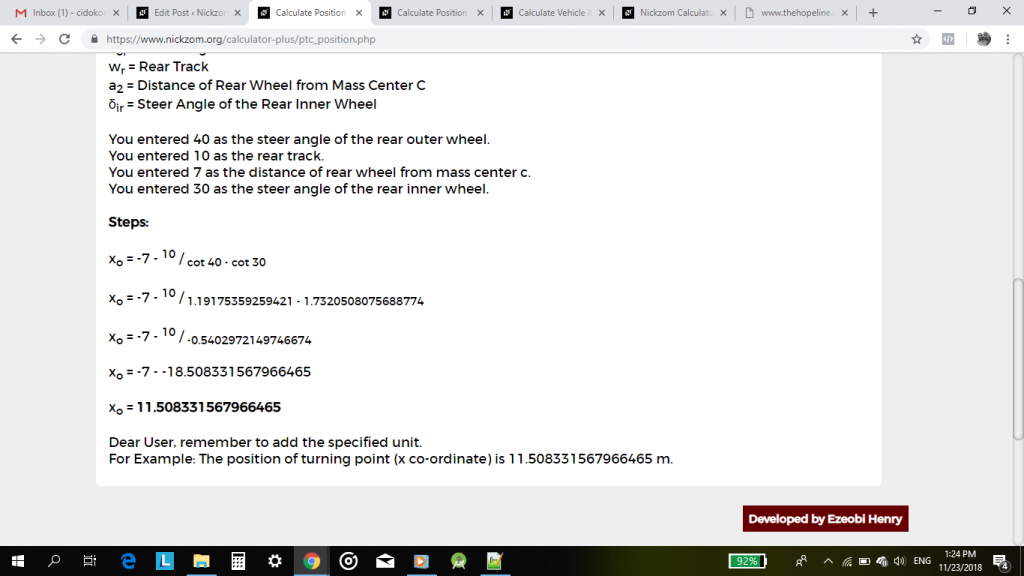
Click on Calculate to display the result for the position of turning point (x co-ordinate)
Now, let me show you how Nickzom Calculator calculates the Position of Turning Point (y co-ordinate).
To get the answer, Nickzom Calculator requires 5 parameters which are:
- Steer Angle of the rare inner wheel
- Rear Track
- Front Track
- Wheel Base
- Steer Angle of Front Inner Wheel
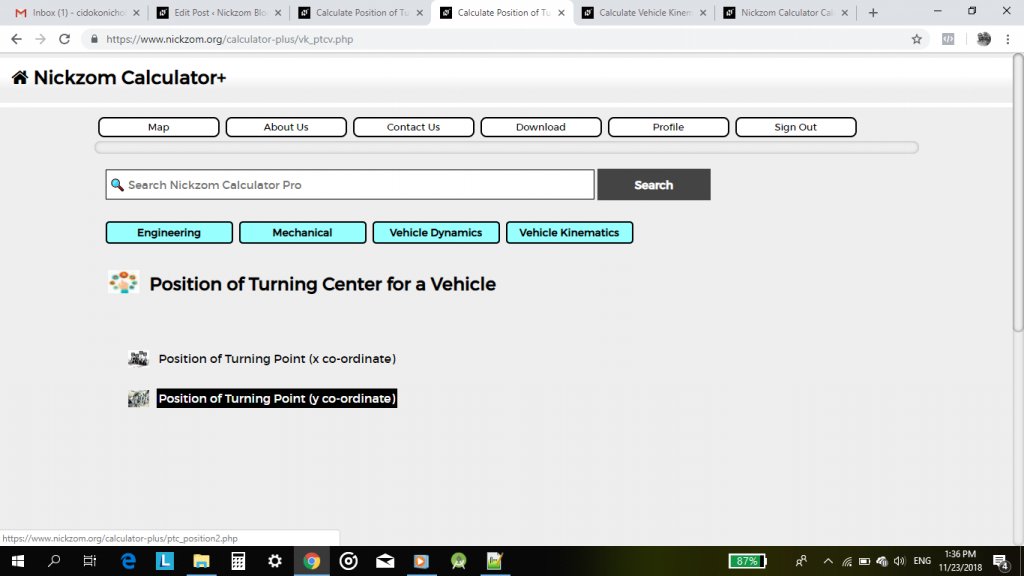
Now on the top side of the current page you would see a navigate link “Position of Turning Center for a Vehicle” like the image shown below. Click on the link
Then click on Position of Turning Point (y co-ordinate)
The page or activity that displays before you is where you enter the accurate values of your parameters.
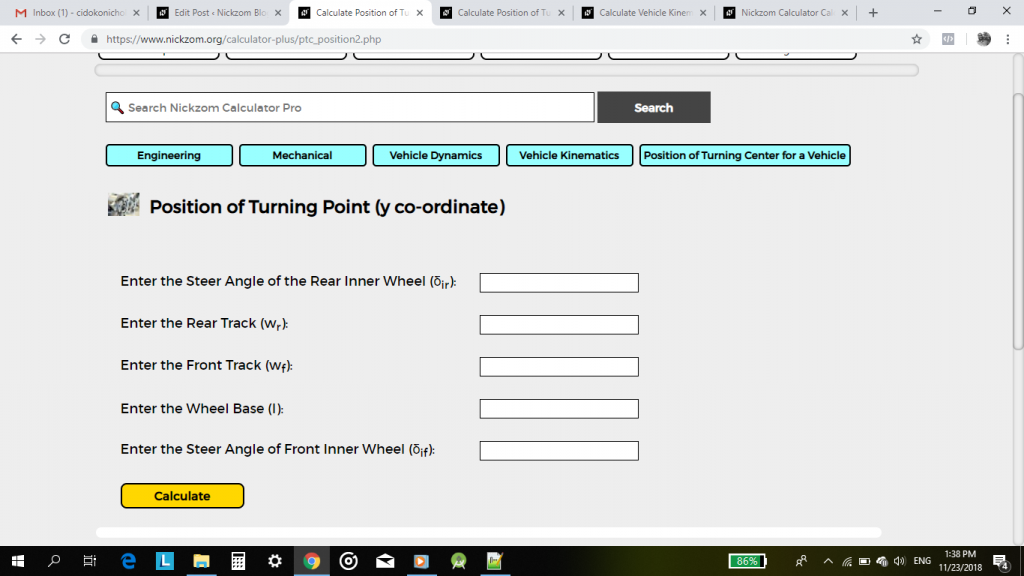
Enter your values appropriately
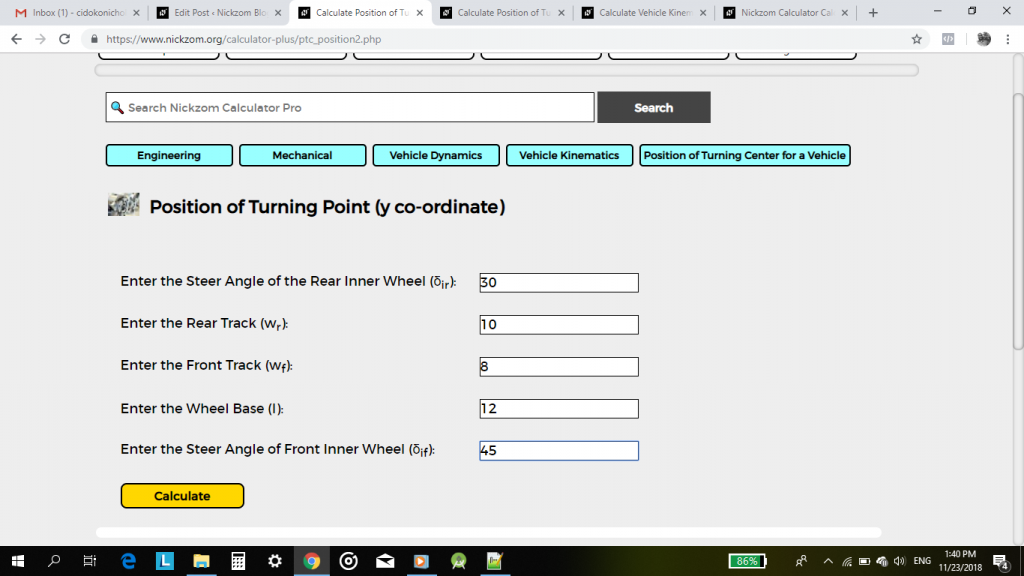
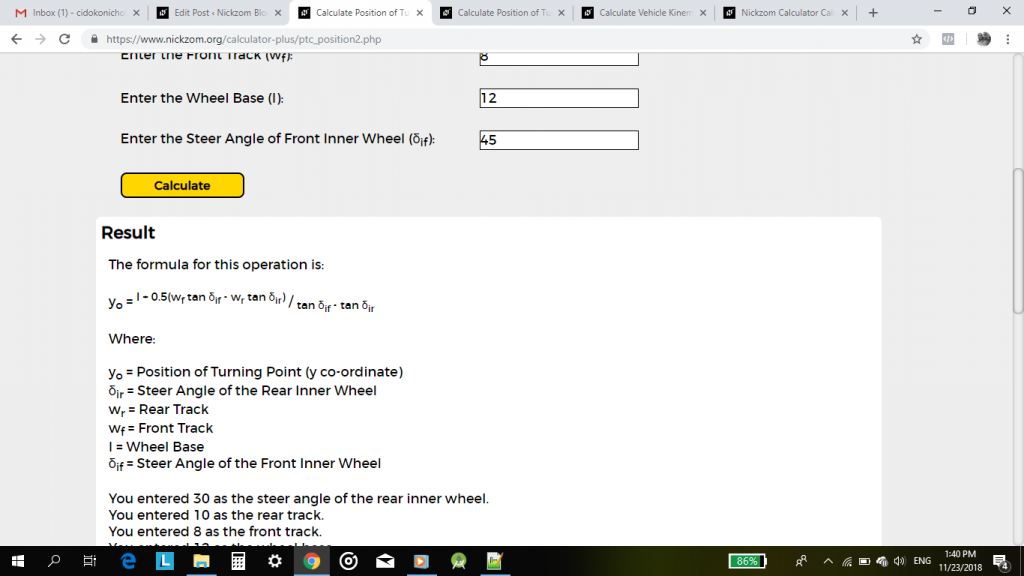
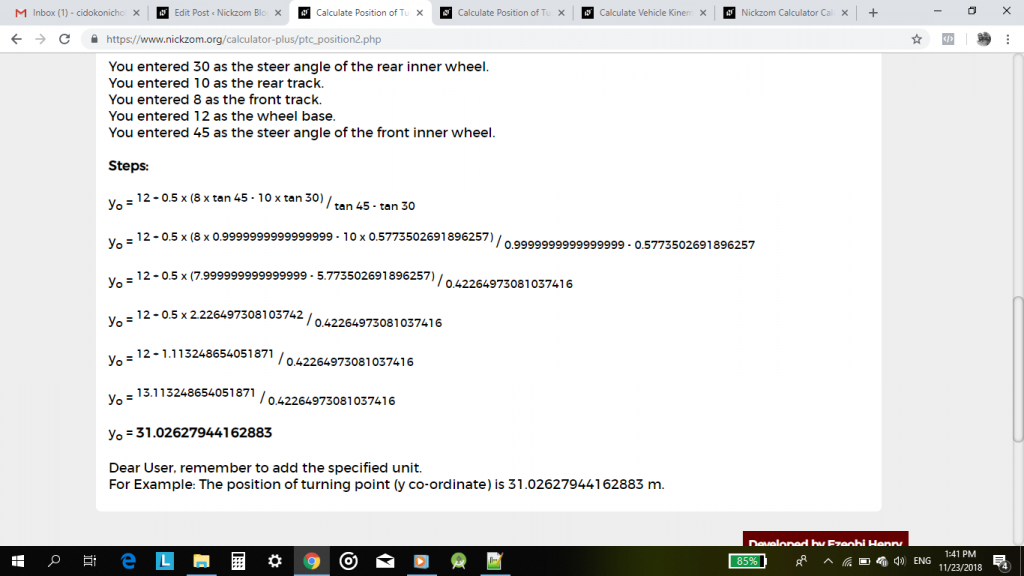
Then, click on Calculate for the result from The Calculator Encyclopedia
Therefore, all Mechanical Engineering students and professionals should have this tool to make computation and getting answers to calculations easy and breezy.
Great article, exactly what I needed. https://ketoneboost.net/
Do you mind if I add some more detail? Your logic should be accepted and normal for all…it’s just that..There are some other points that synergize with this. Namaste- thank you for your consideration.